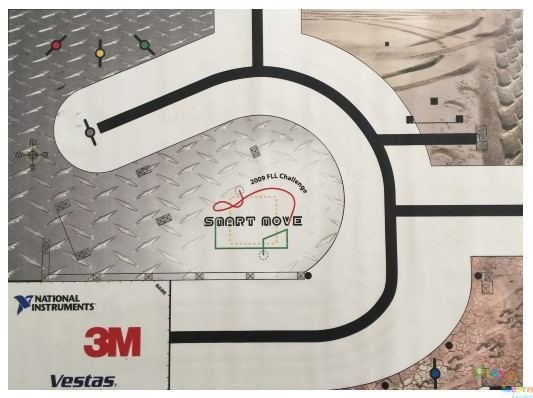
Welcome to the last two classes. We are going to build a team project, build a robot that can follow the curved road to the end, finish some task, then follow the same road home. The robot is ranked by the scores it can earn for completing tasks. All team effort, quality of the code, comments are scored as well. This challenge will require some of the knowledge from previous class. Also, the fundamental lane following codes are provided as reference. Students can explore more options by try and error on the map. It is a challenge problem. Some teams finished some tasks in this class. We are looking forward to see them finish all tasks by next class. Thank you for cleaning up every class. We are going to celebrate learning next class.
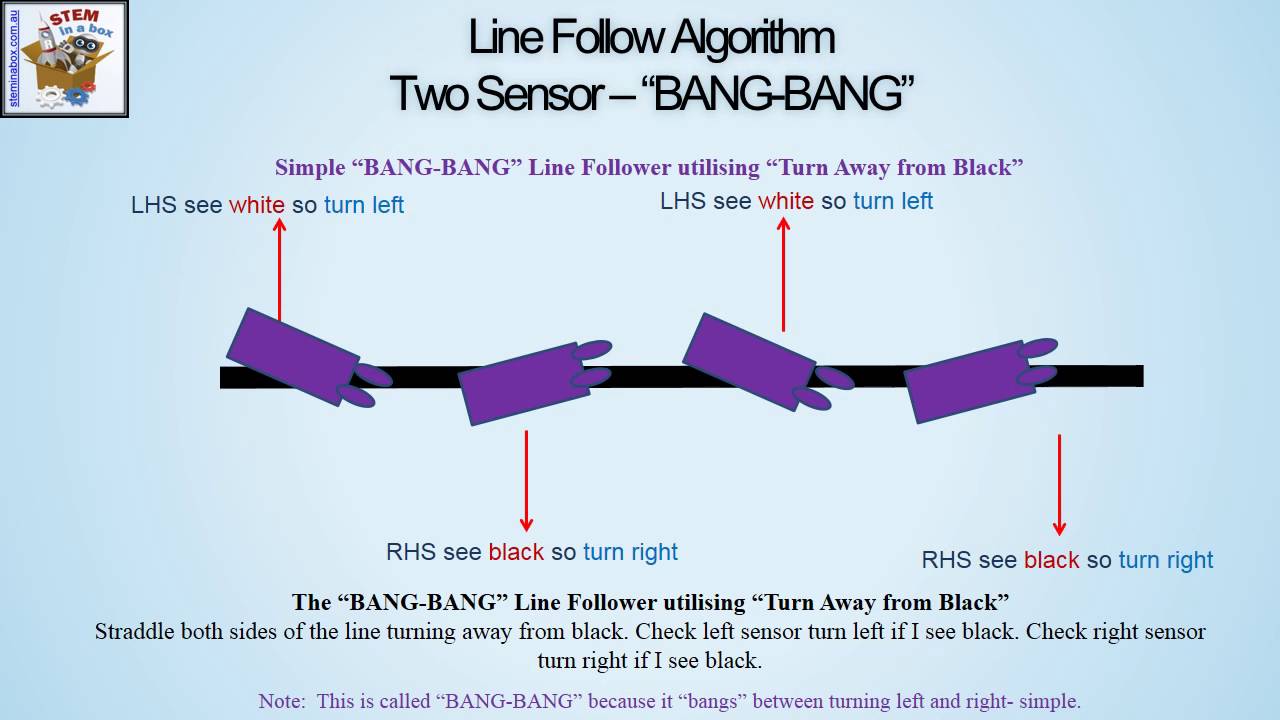
Lego EV3 Lane Following