Hooray! We finished the last challenge tonight. Congrats. You actually have most of the building blocks to do your own project. During this mini challenge, we tested your skills and patient. Programming has its fun part, but it is also require lot of hard work. I hope all of you can handle it sometime. Hope see you all at the coming FLL competition.
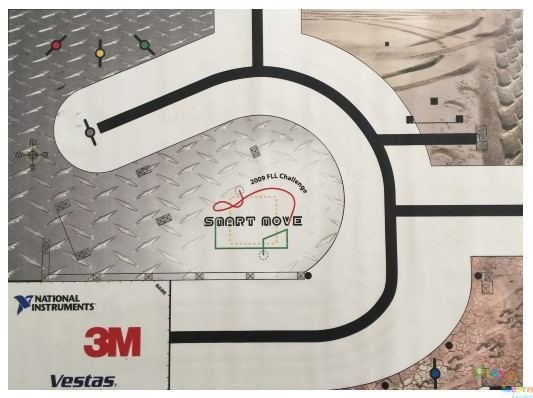
Lego EV3 Self-driving Challenge Final