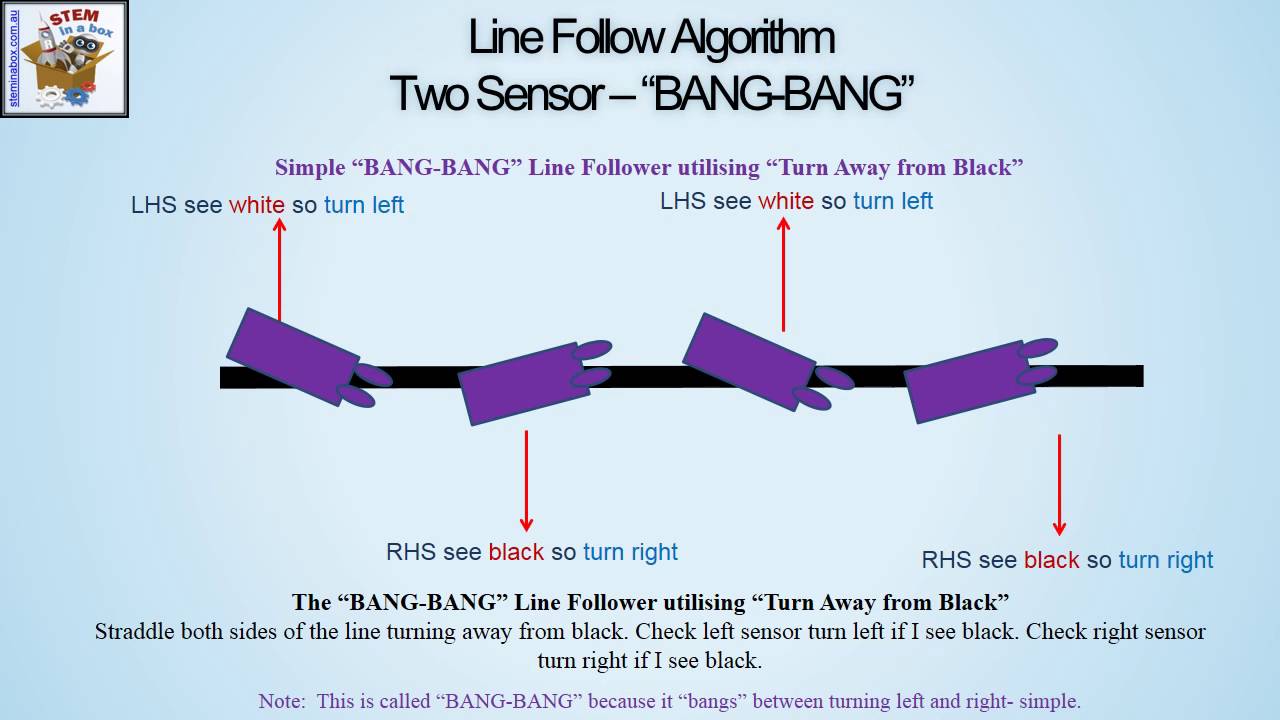
Welcome back the lego EV3 self driving challenge. Today, we put what we have learned skills together to build a color sensor lane following car. It also called “Bangbang lane follower”. There are only hand full of coding block today. But today we need test our robot on map, see if it can follow the lane for more than two meters. We spend some time to make a notes in the program, so we can read at home, or we can understand other people’s code. Each student have three difficulty level programs to test on the track. We do need sometime to debug. We have good time on the track tonight. Next class we are going to build cruise control for the vehicle. Feel like we are run out of display room for your program. We have solution in next class. Thank you again for set up and clean the room.

We Provide STEM Education for Kids!