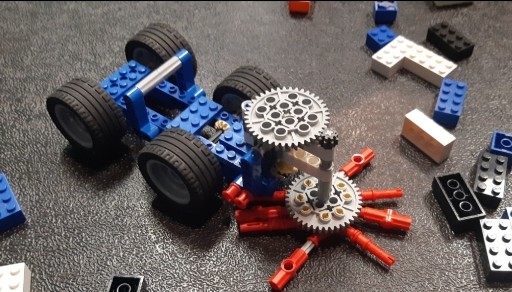
Week 4!!! Had a great time creating our Lego Sweepers. We used gear ratios again to speed up our Sweeper rotation speed! A big unique factor of this build was how the build connected the sweeper rotation to the wheel rotation. This engaged the sweeper when ever the vehicle was in motion! After the build we used lego blocks as trash and swept it out of the way using our new build! Everyone used their creative skills to upgrade the sweeper to have more arms and better efficiency! Can’t wait till next week, we’re building a flywheel roadster!!!
Communication ECA Phase 1 Class 4: Big Wheel Brick Sweeper 20191002